






Principios básicos
Empezando
En esta guía, actualmente no cubriré el desembalaje y el montaje del láser en sí. Sculpfun (y sus competidores) tiene buenos tutoriales, y hay multitud en youtube también (el tutorial de Sculpfun está aquí). Una vez que haya configurado todo, estará listo para comenzar. Al menos casi. El láser en sí tiene un tablero de control incluido, pero sin software externo es más o menos inútil. En las siguientes secciones, daré una breve descripción de la estructura de control.
Notas sobre la configuración mecánica
La configuración mecánica es sencilla en general, pero también tiene algunos obstáculos que superar. Primero, debes asegurarte de que el marco sea rectangular. Comience dejando todos los tornillos ligeramente flojos, enderece el marco y luego apriete los tornillos finalmente. Las correas que utilizan los motores para accionar el pórtico deben estar tan apretadas que el cabezal láser no se mueva ni se tambalee libremente. Pero tampoco deben estar tan apretados que el pórtico ya no se mueva. Un buen método para comprobarlo es la prueba de inclinación. Incline su marco 45°. Si el pórtico se mueve lentamente hacia abajo, entonces las correas están apretadas correctamente (no es una ciencia exacta, pero está bien como prueba). Haga esto para ambos ejes. Una guía más elaborada está aquí.
Tablero de control, firmware y software de control
En esta sección, quiero dar una breve descripción de cómo funciona el control de un grabador láser. En mi experiencia, surgen muchas preguntas porque la función no está del todo clara.
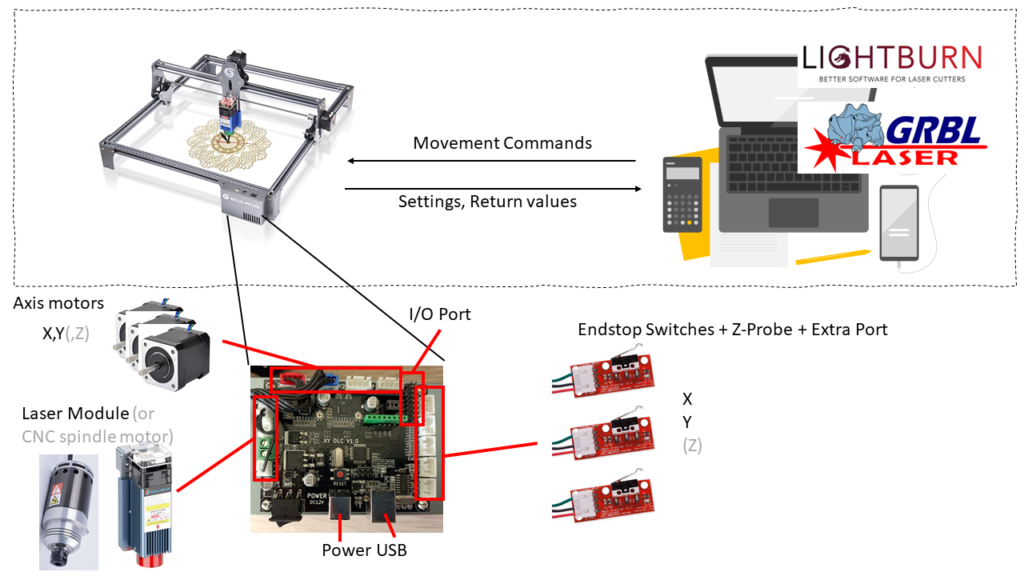
Estructura basica
El láser contiene un tablero de control en el que se instala un determinado firmware (software que se ejecuta en un microcontrolador). La tarea del firmware es traducir los comandos de control del software de control en un PC externo en movimientos y encendido/apagado del láser. El PC de control transmite los comandos al controlador en los llamados "códigos G". Los códigos G son/es un tipo de lenguaje de programación para máquinas CNC. Con esto, se pueden ejecutar comandos de movimiento y otras acciones. Un código G clásico consta de letras y números. Por ejemplo, “G0 X100 Y100”. Este comando crea un movimiento lineal rápido hasta la posición X=100 mm e Y=100 mm. (referencias: linuxcnc.org, grbl) El tablero de control del grabador láser ejecuta un dialecto llamado grbl (jerbo pronunciado, https://github.com/gnea/grbl). Este dialecto está diseñado específicamente para controlar máquinas láser y CNC. Es un proyecto de código abierto y, por lo tanto, de uso y modificación gratuitos.
Funcionalidad del firmware de excursión
Para que el firmware ejecute correctamente los comandos de control es necesario tener algunos conocimientos previos sobre la mecánica de la máquina. El firmware genera comandos de control exactos para los motores, pero los motores no entienden las posiciones absolutas, sólo cuántos pasos más deben girar. Esta es una peculiaridad de los llamados motores paso a paso instalados.
Información sobre motores paso a paso
Los motores paso a paso se controlan paso a paso. Según el modelo, el tamaño del paso es, por ejemplo, 1,6 grados. Esto significa que se realizan 225 pasos para una revolución completa (360 grados). Los módulos del controlador del motor dividen estos pasos en micropasos (por ejemplo, 16), de modo que en este caso resultan 3600 pasos (360/1,6×16) para una revolución completa. Ahora tienes que saber qué distancia se mueve el sistema durante una revolución completa. Esto debe derivarse de la mecánica, por ejemplo, qué tipo de engranaje o correa acciona el sistema. Cuando hayas calculado los pasos por mm de recorrido con esta información, el firmware podrá ejecutar el movimiento correctamente. La configuración mecánica del Sculpfun S6 / S9 utiliza 80 pasos/mm. Eso significa que el firmware debe enviar 80 pasos al motor para que el cabezal láser se mueva 1 mm.
Si el movimiento físico no coincide con el movimiento previsto, los parámetros de pasos/mm deben ajustarse en consecuencia. Puede hacerlo manualmente o utilizar una función de asistencia como la que se incluye en LightBurn. (Documentación de LightBurn)
Otros parámetros interesantes del firmware en este curso son las velocidades máximas y aceleraciones. Por la presente, se especifica al firmware qué tan rápido puede ser el movimiento máximo y qué tan rápida puede ser la aceleración máxima. Estos valores también deben adaptarse a la máquina. Cuanto más pesado sea el carro a mover o cuanto más débiles sean los motores, más lento podrá funcionar la máquina. Se puede dar a la máquina una velocidad de 10.000 mm/min. Pero si los motores no pueden alcanzar físicamente esta velocidad, se obtiene un comportamiento no determinista. Lo mismo ocurre con la aceleración. Si se ajusta demasiado alto, los motores no pueden alcanzar esta aceleración o se sobrepasan y producen un movimiento vibratorio. Si quieres sacarle el máximo partido, deberás ajustar la aceleración de forma que no se noten vibraciones. Para la velocidad también es necesario medir qué velocidad aún puede alcanzar la mecánica. [Si algún día tengo tiempo, intentaré hacer algunas mediciones en mi Sculpfun S6 para determinar los parámetros optimizados.
En el firmware puede configurar algunos parámetros más, estos se explicarán si son necesarios en las respectivas situaciones.
Todos los parámetros del firmware tienen un número y se abordan con el signo de dólar $ al frente. Por lo tanto, a menudo verá designaciones como "$32=1". Esto significa que el parámetro 32 debe establecerse en el valor 1. La explicación de los parámetros se puede encontrar en el descripción del firmware. Herramientas como LightBurn o LaserGRBL también ofrecen una opción de configuración gráfica para estos parámetros. Puede configurar los parámetros manualmente a través de la consola. La consola es una interfaz de comunicación directa que muestra los mensajes del firmware y también puede aceptar comandos. Allí puede escribir el comando como se indicó anteriormente, "$32=1", y esto programará y guardará el valor.
Puede encontrar información adicional sobre el firmware en el artículo sobre actualizaciones de firmware.
programas de control
Hay bastantes herramientas disponibles para controlar el láser. Especialmente populares son LightBurn y LaserGRBL. LaserWeb es otra herramienta. Podría escribir otro artículo sobre las ventajas y desventajas de estas herramientas. Por ahora, esto es sólo una cuestión de principio. Cuando el motivo se prepara en el software de control, se puede enviar al microcontrolador. Una vez iniciado este proceso, la PC envía un flujo continuo de comandos al microcontrolador. Por lo tanto, no se debe desconectar la conexión. Si hay errores de transmisión en el camino, el microcontrolador no entenderá/ejecutará los comandos. Por lo tanto, es importante utilizar un cable USB lo más corto posible y de alta calidad. Esta es una causa común de errores. ¡Además, el PC de control no debe entrar en modo de espera mientras se utiliza el láser!
En el software de control se pueden especificar varios parámetros, como la velocidad. ¡Estos son ejecutados por el firmware, pero sólo dentro de los límites establecidos! Si se establece 3.000 mm/min como velocidad máxima en el firmware, los movimientos NO se ejecutarán más rápido, incluso si el software especifica 6.000 mm/min. Si el valor enviado está por encima del máximo establecido, el firmware toma su propio valor máximo. Por lo tanto, es mejor mantenerse dentro de los límites del firmware cuando utilice su láser. Esto conduce a los mejores resultados de predicción. Si envía movimiento a 6000 mm/min a su láser, pero el firmware está configurado en 3000 mm/min, LightBurn le dirá que el proceso tarda (por ejemplo) 3 minutos, pero en realidad tarda 6 (porque se ejecuta en a media velocidad).
Reimpresión del artículo: https://wiki.the-iskens.com/documentation/basic-principles-of-laser-cutters-engravers/
- Elegir una selección da como resultado una actualización de página completa.